日々の活動記録や、暇つぶしなどなど
中間発表できるくらいのネタはできた…と思う。
今まで準備してきた中で一番作業が進んだと思う。
いや、実際には今までも進んでいたんだけど、ようやく本筋に入れたというところ。
卒論は移動ロボットの障害物回避についてなんだけども、つい最近までロボットのハード作ってましたorz
正確には作ってセンサの評価とかモータドライバの最適化とかハードウェアをつめていたという話。
で、これは卒論にまったくならないわけで。
ここ1週間で実際にロボットを動かしたりセンサ情報を取得するプログラムを書き始めたというところです。
で、今日の成果。
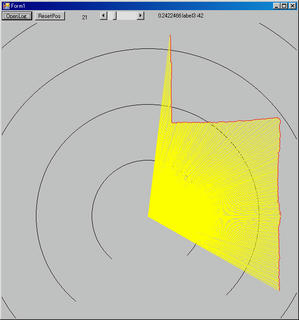
ロボットに搭載したレーザレンジファインダを使ってロボット周囲の距離情報を取得。
それをログとして保存し、Windows上でログを表示できるようにしたところ。
赤が壁で黄色が探索済み領域。灰色は未探索領域。黒は50cmごとのライン。
ぶっちゃけWindowsアプリはほとんど書いたことないし、グラフィックというか、図形処理もほとんどはじめてなわけで苦労しまくり。
でもとりあえずロボットが通れない隙間とかを抜き出せるようにはなった。と思う。
後はこの点集合に当たらないようにロボットを走らせるだけ。
というのが当然一番大変。
しかも最終目標は障害物が移動するんだよね。
固定だと論文にならん(すでに開拓されつくしてる)。
今まで準備してきた中で一番作業が進んだと思う。
いや、実際には今までも進んでいたんだけど、ようやく本筋に入れたというところ。
卒論は移動ロボットの障害物回避についてなんだけども、つい最近までロボットのハード作ってましたorz
正確には作ってセンサの評価とかモータドライバの最適化とかハードウェアをつめていたという話。
で、これは卒論にまったくならないわけで。
ここ1週間で実際にロボットを動かしたりセンサ情報を取得するプログラムを書き始めたというところです。
で、今日の成果。
ロボットに搭載したレーザレンジファインダを使ってロボット周囲の距離情報を取得。
それをログとして保存し、Windows上でログを表示できるようにしたところ。
赤が壁で黄色が探索済み領域。灰色は未探索領域。黒は50cmごとのライン。
ぶっちゃけWindowsアプリはほとんど書いたことないし、グラフィックというか、図形処理もほとんどはじめてなわけで苦労しまくり。
でもとりあえずロボットが通れない隙間とかを抜き出せるようにはなった。と思う。
後はこの点集合に当たらないようにロボットを走らせるだけ。
というのが当然一番大変。
しかも最終目標は障害物が移動するんだよね。
固定だと論文にならん(すでに開拓されつくしてる)。
PR
この記事にコメントする
カウンター
委託案内
アンプ基板や同人誌を委託販売しています.リンクからどうぞ.(外部サイト)
・HA10mini基板セット
・HA10mini終段基板
・HA10miniハイパワーキット
・HPA&Analog vol.6冊子版
・同人誌DL委託
・同人誌DL委託(旧サークル名)
・HA10mini基板セット
・HA10mini終段基板
・HA10miniハイパワーキット
・HPA&Analog vol.6冊子版
・同人誌DL委託
・同人誌DL委託(旧サークル名)
ブログ内検索
カレンダー
| 11 | 2025/12 | 01 |
| S | M | T | W | T | F | S |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| 21 | 22 | 23 | 24 | 25 | 26 | 27 |
| 28 | 29 | 30 | 31 |
最新記事

最新トラックバック
カテゴリー
SilverLight
アクセス解析
広告