日々の活動記録や、暇つぶしなどなど
先日記事をアップした機体でも使っている,HobbyKingのMultiWii基板ですが,すんなり使うには一苦労したので,メモも兼ねて使い方を書いておきます.
まず,ものはこちら.USB-シリアル変換であるFT232RLも乗っており,MultiWiiのファームがすでに書かれているので,USB接続するだけでArduinoIDEから認識することができます.
■基板について
 本家に具体的な基板の説明が全く無いのでここに書いておきます.
本家に具体的な基板の説明が全く無いのでここに書いておきます.
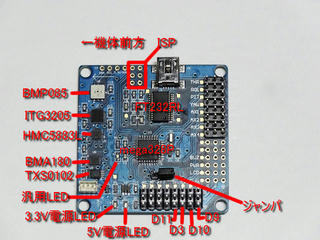
まず,基板の外観+センサなどの配置はこのようになっています.
この基板ではspectramの受信機とシリアルでつなげる機能がありますが,国内ではspectramのプロポは使えないのでとりあえず無視.
そのため,図中のジャンパは図の右側で固定使用になります.このジャンパを正しく設定しておかないと,設定ソフトで設定ができなくなります.
普通の受信機の場合は図右のTHRからAX1までに接続します.AX2から4は後述しますが,排他利用のため,そのままでは使えません.
ESCは右下のD9,D10,D3,D11につなぎます.どこにどうつなぐかは後述します.
まずは情報のまとめから.
使用されているIC一覧
U2 FT232RL
U3 ATMega328
U4 5Vto3.3Vのレギュレータ
U5 HMC5883L
U6 BMP085
U7 ITG3205
U8 BMA180
U9 TXS0102DCUR?? 双方向のI2Cレベルコンバータ
ATmega328Pのピン接続
PB0 NC?
PB1 D9 & BUZ
PB2 D10
PB3 D11
PB4 A3 & PWR
PB5 D4(汎用LED)
PB6 XTAL
PB7 XTAL
PC0 A0
PC1 A1
PC2 A2
PC3 NC?
PC4 U9のB2
PC5 U9のB1
PC6 ISPの#RESET
ADC6 BUZの上
ADC7 AX4の下
PD0 AX2 & FT232のTX
PD1 AX3 & LCD & FT232のRX
PD2 THR
PD3 D3 & AX4
PD4 ROL
PD5 PIT
PD6 YAW
PD7 AX1
となっています.ISPはRESET以外もちゃんとつながっているんですが,面倒臭がって書いていません.
ここで注意するのは,&で書かれているものは,それぞれ全てに接続されており,排他利用形式になります.
そのため,受信機をすんなり接続できるのはTHRからAX1までとなり,それ以上は面倒になります.というか,PD3なんて,出力とかちあってるのでどう考えても利用できません.
■接続・設定から飛ばすまで
買った状態そのままの基板でも,MultiWiiの基本的なプログラムは書き込まれていました.デフォルトで,クアッドコプタのX配置の設定になっています.これを変えるには,プログラムを書き換えないていけません.プログラムの書き換えについては後述.
英語読める人はここからどうぞ.
http://www.multiwiicopter.com/pages/multiwiicopter-wiki
まずはMultiWiiの本家プロジェクトから設定ツールをダウンロードします.設定ツールがないと,ゲイン設定などができないので必須です.
http://code.google.com/p/multiwii/downloads/detail?name=MultiWii_2_1.zip&can=2&q=
ここからMultiWii_2_1.zipをダウンロードして適当な場所で解凍すると
MultiWii_2_1
MultiWiiConf_2_1
change.txt
となるはずです.このMultiWiiConfが設定ツールになります.MultiWiiの方は,Arduinoのソースなので,ここでは置いておきます.
設定ツールはJAVAで作られているので,JAVAのランタイムが必要になります.適当にダウンロードしてインストールしておいてください.それが終われば,MultiWiiConfの下の自分の環境にあったディレクトリにあるバイナリファイルを実行するだけです.Windowsなら拡張子がexeのものです.ただ,自分はWindows7の64bit版を使ってますが,32bit版でしかうまく起動できませんでした.まぁ,使えればいいので特に気にしないことにしましょう.一応起動することを確認したら,とりあえず終了させてください.
終了したら,基板をUSBで接続し,FT232のドライバインストールが完了するまで済ませてください.仮想COMとして認識されたらMultiWiiConfを起動します.
 起動したら,左の方にあるCOMなんちゃらから基板のCOMポートを選び選択します.
起動したら,左の方にあるCOMなんちゃらから基板のCOMポートを選び選択します.
 接続がうまく出来ればこんな感じでCOM周辺の文字の背景が緑になります.この状態で,真ん中の白い領域の左上にあるSTARTを押します.
接続がうまく出来ればこんな感じでCOM周辺の文字の背景が緑になります.この状態で,真ん中の白い領域の左上にあるSTARTを押します.
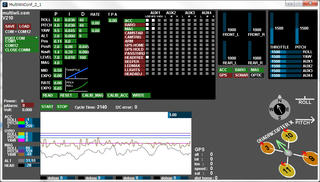 これもうまくいけば図のような表示になるはずです.ただし,この画像では,すでに色々と設定した基板をつないでいるので,ゲインの値やAUX1などの部分の表示が違うかと思います.大事なのは,右下に出てきた機体の表示です.この表示のとおりにESCを接続することになります.左前がD3,右前がD10,左後がD11,右後ろがD9です.そして,ペラの回転方向も右下の図のとおりにします.左前・右後ろが時計回り,右前・左後が反時計回りです.ここの表示は基板から設定を読みだした上で表示されるので,基板の設定が違うものだった場合は,違う機体が表示されます.
これもうまくいけば図のような表示になるはずです.ただし,この画像では,すでに色々と設定した基板をつないでいるので,ゲインの値やAUX1などの部分の表示が違うかと思います.大事なのは,右下に出てきた機体の表示です.この表示のとおりにESCを接続することになります.左前がD3,右前がD10,左後がD11,右後ろがD9です.そして,ペラの回転方向も右下の図のとおりにします.左前・右後ろが時計回り,右前・左後が反時計回りです.ここの表示は基板から設定を読みだした上で表示されるので,基板の設定が違うものだった場合は,違う機体が表示されます.
後は適当に基板を動かして,右にあるROLLとPITCHがそれっぽく動くか確認しましょう.とりあえずこれだけ確認できればOKです.USBを抜くときは,左上のCLOSE COMMを押してから抜きましょう.それをしないと,再接続した時に,うまく認識してくれません.
続いて,受信機とMultiWii基板をつないでからUSB接続し,プロポの設定をします.プロポは最低4chあれば操作できます.スロットルをTHRに,エレベータをPITCHに,エルロンをROLLに,ラダーをYAWにつなぎます.
この状態でMultiWiiConfを見てみると,右上の表示がそれぞれのスティックに対して反応していればOKです.
スティックの動作と水色のバーの動く向きを揃える必要があるので,適宜リバーススイッチで対応してください.
また,MultiWiiのセンター値は1500なので,特に双葉の場合はトリムでセンターが1500になるように調整してください.
次に,各スティックの最大値が1905,最小値が1095になるようにトラベルの調整をします.これが無理な場合,プログラムで調整するか,5ch目を用意しないと飛ばすことができませんので,要注意.
これでプロポの設定は完了です.
次に基板を機体にくみこみ,平らなところに置き,もう一度接続します.接続したら,真ん中の方にあるCALIB_ACCを押します.これで加速度センサのキャリブレーションを行います.これを押すときは必ず平らで水平なところに機体を起き,キャリブレーション中は触らないようにします.完了したら今度は機体を手に持ち,CALIB_MAGを押して,基板のLEDが消えるまで,ロール・ピッチ・ヨー,すべての方向についてぐるぐる回します.これで地磁気センサのキャリブレーションが完了です.
以上で,飛ばす前に必要な設定が完了です.
ここまでできたら,ESCを接続し,ペラを外した状態で各電源を入れます.この時USBは繋ぐ必要はないですが,つないでても問題無いです.電源を入れた直後はキャリブレーションを行なっているので,機体を揺らさないようにしてください.ESCは
・ガバナ無し
・スロースタート無し
・電圧監視無しorNiMH
に設定しておきます.最後のは特に重要で,複数のESCを使うマルチコプタでは,どれか一つのESCでもストップすると即墜落してしまいます.ESCの電圧検出はそんなに厳密では無い上に,モータの使用電流によって,一つだけ先に電圧監視に引っかかってしまうことがあります.もしその状態でカットオフしてしまうと,即墜落になるということです.そこで,マルチコプタでは,ESCによる電圧カットは利用せず,外付けのLiPOアラームで電圧管理します.
話がそれましたが,この状態で電源を入れると,待機状態(Disarmed)になります.この状態では,制御もされないし,プロポで操作することも出来ません.スロットルを一番下まで下げ,ラダーを右いっぱいに切ると,飛行モード(Armed)になります.ESCによってはこの時点でモータが回ります.逆に,スロットルが最低の状態でラダーを左いっぱいに切ると,再びDisarmedになります.この動作はもしもの時には,即座にモータを止めないといけないので,よく体に染み込ませておきましょう.
Armedにした状態で,スロットルを上げていくと各モータの回転数が上がるはずです.まずはペラの回転方向を先に確認した回転方向に合わせます.
続いて,スロットルを真ん中ぐらいにして機体を手で持ち,傾けてみると,下になった側のモータの回転数が上がるはずです.全方向に傾けて確認しましょう.さらに,ヨー回転させると,機体が回転した方向と同じ向きに回っているモータの回転数が上がるはずです.また,それぞれ反対側のモータは回転数が下がるはずです.
もしこれが違うようならESCの配線を疑ってください.間違ってないようなら,プログラムを修正する必要があります.
とりあえずここまで出来れば飛ばす寸前まで来たことになります.
実際に飛ばすにはゲイン調整や,加速度センサなどの有効/無効切り替えなどをしないといけませんが,だいぶ長くなってしまったので,また後日追記したいと思います.
というか,流れないように本家サイトの方に移動するかもしれません.
まず,ものはこちら.USB-シリアル変換であるFT232RLも乗っており,MultiWiiのファームがすでに書かれているので,USB接続するだけでArduinoIDEから認識することができます.
■基板について
まず,基板の外観+センサなどの配置はこのようになっています.
この基板ではspectramの受信機とシリアルでつなげる機能がありますが,国内ではspectramのプロポは使えないのでとりあえず無視.
そのため,図中のジャンパは図の右側で固定使用になります.このジャンパを正しく設定しておかないと,設定ソフトで設定ができなくなります.
普通の受信機の場合は図右のTHRからAX1までに接続します.AX2から4は後述しますが,排他利用のため,そのままでは使えません.
ESCは右下のD9,D10,D3,D11につなぎます.どこにどうつなぐかは後述します.
まずは情報のまとめから.
使用されているIC一覧
U2 FT232RL
U3 ATMega328
U4 5Vto3.3Vのレギュレータ
U5 HMC5883L
U6 BMP085
U7 ITG3205
U8 BMA180
U9 TXS0102DCUR?? 双方向のI2Cレベルコンバータ
ATmega328Pのピン接続
PB0 NC?
PB1 D9 & BUZ
PB2 D10
PB3 D11
PB4 A3 & PWR
PB5 D4(汎用LED)
PB6 XTAL
PB7 XTAL
PC0 A0
PC1 A1
PC2 A2
PC3 NC?
PC4 U9のB2
PC5 U9のB1
PC6 ISPの#RESET
ADC6 BUZの上
ADC7 AX4の下
PD0 AX2 & FT232のTX
PD1 AX3 & LCD & FT232のRX
PD2 THR
PD3 D3 & AX4
PD4 ROL
PD5 PIT
PD6 YAW
PD7 AX1
となっています.ISPはRESET以外もちゃんとつながっているんですが,面倒臭がって書いていません.
ここで注意するのは,&で書かれているものは,それぞれ全てに接続されており,排他利用形式になります.
そのため,受信機をすんなり接続できるのはTHRからAX1までとなり,それ以上は面倒になります.というか,PD3なんて,出力とかちあってるのでどう考えても利用できません.
■接続・設定から飛ばすまで
買った状態そのままの基板でも,MultiWiiの基本的なプログラムは書き込まれていました.デフォルトで,クアッドコプタのX配置の設定になっています.これを変えるには,プログラムを書き換えないていけません.プログラムの書き換えについては後述.
英語読める人はここからどうぞ.
http://www.multiwiicopter.com/pages/multiwiicopter-wiki
まずはMultiWiiの本家プロジェクトから設定ツールをダウンロードします.設定ツールがないと,ゲイン設定などができないので必須です.
http://code.google.com/p/multiwii/downloads/detail?name=MultiWii_2_1.zip&can=2&q=
ここからMultiWii_2_1.zipをダウンロードして適当な場所で解凍すると
MultiWii_2_1
MultiWiiConf_2_1
change.txt
となるはずです.このMultiWiiConfが設定ツールになります.MultiWiiの方は,Arduinoのソースなので,ここでは置いておきます.
設定ツールはJAVAで作られているので,JAVAのランタイムが必要になります.適当にダウンロードしてインストールしておいてください.それが終われば,MultiWiiConfの下の自分の環境にあったディレクトリにあるバイナリファイルを実行するだけです.Windowsなら拡張子がexeのものです.ただ,自分はWindows7の64bit版を使ってますが,32bit版でしかうまく起動できませんでした.まぁ,使えればいいので特に気にしないことにしましょう.一応起動することを確認したら,とりあえず終了させてください.
終了したら,基板をUSBで接続し,FT232のドライバインストールが完了するまで済ませてください.仮想COMとして認識されたらMultiWiiConfを起動します.
後は適当に基板を動かして,右にあるROLLとPITCHがそれっぽく動くか確認しましょう.とりあえずこれだけ確認できればOKです.USBを抜くときは,左上のCLOSE COMMを押してから抜きましょう.それをしないと,再接続した時に,うまく認識してくれません.
続いて,受信機とMultiWii基板をつないでからUSB接続し,プロポの設定をします.プロポは最低4chあれば操作できます.スロットルをTHRに,エレベータをPITCHに,エルロンをROLLに,ラダーをYAWにつなぎます.
この状態でMultiWiiConfを見てみると,右上の表示がそれぞれのスティックに対して反応していればOKです.
スティックの動作と水色のバーの動く向きを揃える必要があるので,適宜リバーススイッチで対応してください.
また,MultiWiiのセンター値は1500なので,特に双葉の場合はトリムでセンターが1500になるように調整してください.
次に,各スティックの最大値が1905,最小値が1095になるようにトラベルの調整をします.これが無理な場合,プログラムで調整するか,5ch目を用意しないと飛ばすことができませんので,要注意.
これでプロポの設定は完了です.
次に基板を機体にくみこみ,平らなところに置き,もう一度接続します.接続したら,真ん中の方にあるCALIB_ACCを押します.これで加速度センサのキャリブレーションを行います.これを押すときは必ず平らで水平なところに機体を起き,キャリブレーション中は触らないようにします.完了したら今度は機体を手に持ち,CALIB_MAGを押して,基板のLEDが消えるまで,ロール・ピッチ・ヨー,すべての方向についてぐるぐる回します.これで地磁気センサのキャリブレーションが完了です.
以上で,飛ばす前に必要な設定が完了です.
ここまでできたら,ESCを接続し,ペラを外した状態で各電源を入れます.この時USBは繋ぐ必要はないですが,つないでても問題無いです.電源を入れた直後はキャリブレーションを行なっているので,機体を揺らさないようにしてください.ESCは
・ガバナ無し
・スロースタート無し
・電圧監視無しorNiMH
に設定しておきます.最後のは特に重要で,複数のESCを使うマルチコプタでは,どれか一つのESCでもストップすると即墜落してしまいます.ESCの電圧検出はそんなに厳密では無い上に,モータの使用電流によって,一つだけ先に電圧監視に引っかかってしまうことがあります.もしその状態でカットオフしてしまうと,即墜落になるということです.そこで,マルチコプタでは,ESCによる電圧カットは利用せず,外付けのLiPOアラームで電圧管理します.
話がそれましたが,この状態で電源を入れると,待機状態(Disarmed)になります.この状態では,制御もされないし,プロポで操作することも出来ません.スロットルを一番下まで下げ,ラダーを右いっぱいに切ると,飛行モード(Armed)になります.ESCによってはこの時点でモータが回ります.逆に,スロットルが最低の状態でラダーを左いっぱいに切ると,再びDisarmedになります.この動作はもしもの時には,即座にモータを止めないといけないので,よく体に染み込ませておきましょう.
Armedにした状態で,スロットルを上げていくと各モータの回転数が上がるはずです.まずはペラの回転方向を先に確認した回転方向に合わせます.
続いて,スロットルを真ん中ぐらいにして機体を手で持ち,傾けてみると,下になった側のモータの回転数が上がるはずです.全方向に傾けて確認しましょう.さらに,ヨー回転させると,機体が回転した方向と同じ向きに回っているモータの回転数が上がるはずです.また,それぞれ反対側のモータは回転数が下がるはずです.
もしこれが違うようならESCの配線を疑ってください.間違ってないようなら,プログラムを修正する必要があります.
とりあえずここまで出来れば飛ばす寸前まで来たことになります.
実際に飛ばすにはゲイン調整や,加速度センサなどの有効/無効切り替えなどをしないといけませんが,だいぶ長くなってしまったので,また後日追記したいと思います.
というか,流れないように本家サイトの方に移動するかもしれません.
PR
この記事にコメントする
無題
同じものを購入したのはいいのですが、設定?まで行っておりません。情報が少ないところこのサイトを参考にさせていただいておりますが、ボードに受信機をつなぎ、送信機側のステックを動かしても反映されないのは、なにか問題があるのはわかるのですが、何?なのかがわからない状態です。ご参考までにアドバイスいただければありがたいと思います。
ボード->受信機Walkeraを使用。送信機も同じです。MultiWii_2_1は認識しているんですけど、といっても受信機が反応しない?状況です。一人で考えているとなかなか進まない環境です。よろしくお願いします。
ボード->受信機Walkeraを使用。送信機も同じです。MultiWii_2_1は認識しているんですけど、といっても受信機が反応しない?状況です。一人で考えているとなかなか進まない環境です。よろしくお願いします。
Re:無題
このボードはPCにつながないと何も設定できないし,確認もできないのでまずはPCにつないでみましょう.
多分,トラベルの設定をしてないんじゃないですかね.
受信機を繋いでいなくても,コントロール基板をPCにつなぐだけでセンサ情報の表示などはできるので,ためしてみるといいと思います.受信機がつないであれば,正しくつながっているかの判断もできます.
多分,トラベルの設定をしてないんじゃないですかね.
受信機を繋いでいなくても,コントロール基板をPCにつなぐだけでセンサ情報の表示などはできるので,ためしてみるといいと思います.受信機がつないであれば,正しくつながっているかの判断もできます.
深みに....はまってます
こんにちは、言葉足らずですみません。
おっしゃるとおり、ボードをuSBでPCに繋ぎ、ソフトでセンサー情報の表示し、ボードをグリグリ動かすと動きます。ここまでは、このHPで紹介されたような表示を致します。そこでボードに受信機を付け、USBでPCに繋ぎ、ソフトを起動、センサー関連は動いているのを確認できるのですが、.......送信機側のスティクを動かしても、ソフト側でその変化は反映されません。
そこで、ひょっとして儀式(送信機側ステックの約束)が必要なのかと思った次第です。それとも受信機が対応していない(そんな事はかんがえづらいですが)など、考えてしまいます。送受信機はもともとクワットで使用してコントロールボードはイーグルを使用。
でそのまま今回のボードを載せ変えようとしています。
問題の箇所?
1.送受信はできていると思うのですが(受信機側の点滅が止まる)
2.受信機からボード間のコード配線の間違い(不通差し替えても動きますよね)
3.ボードの故障?
4.受信機が対応していない?
5.送信機を認識させる儀式が必要(現在のクワットで使用しているので送受信機は使える)
この場合ボードをぽんづけ出来るんでしょうか?
何らかのヒントをいただけると、ありがたいと思ってます。よろしくお願いいたします。
おっしゃるとおり、ボードをuSBでPCに繋ぎ、ソフトでセンサー情報の表示し、ボードをグリグリ動かすと動きます。ここまでは、このHPで紹介されたような表示を致します。そこでボードに受信機を付け、USBでPCに繋ぎ、ソフトを起動、センサー関連は動いているのを確認できるのですが、.......送信機側のスティクを動かしても、ソフト側でその変化は反映されません。
そこで、ひょっとして儀式(送信機側ステックの約束)が必要なのかと思った次第です。それとも受信機が対応していない(そんな事はかんがえづらいですが)など、考えてしまいます。送受信機はもともとクワットで使用してコントロールボードはイーグルを使用。
でそのまま今回のボードを載せ変えようとしています。
問題の箇所?
1.送受信はできていると思うのですが(受信機側の点滅が止まる)
2.受信機からボード間のコード配線の間違い(不通差し替えても動きますよね)
3.ボードの故障?
4.受信機が対応していない?
5.送信機を認識させる儀式が必要(現在のクワットで使用しているので送受信機は使える)
この場合ボードをぽんづけ出来るんでしょうか?
何らかのヒントをいただけると、ありがたいと思ってます。よろしくお願いいたします。
Re:深みに....はまってます
ふぅむ.それはおかしいですね.受信機が繋がっていれば,Armedしなくてもバーが動きます.
プロポと受信機のバインディングが怪しいんじゃないかなぁとは思います.コントローラボードにつないだ時に受信機の電源はちゃんと入ってますよね?
4chとも故障ってのは考えにくいので,サーボとかを持っているなら,それをつないで試してみるのもありかとおもいます.
プロポと受信機のバインディングが怪しいんじゃないかなぁとは思います.コントローラボードにつないだ時に受信機の電源はちゃんと入ってますよね?
4chとも故障ってのは考えにくいので,サーボとかを持っているなら,それをつないで試してみるのもありかとおもいます.
無題
こんにちは、再度接続しましたが
とうとうPCとコントロールボードをつなぎ、MultiWii2を起動したところ、
ドライバーは認識し、スタートを押してもボードのアクセスランプはつくのですが、センサー類が一切反応しなくなりました。
ただ、ストップを押すと止まります。という事はボードとはつながっているが、センサー類を読み取らなくなってしまったようです。
完全なる手詰まりになりました。
はてさて同したものかと考えております。
このボードの加速・気圧センサーを体験したくて購入しましたが
このボード以外を再度購入しないとしかたのないことなんでしょうか。
何らかの解決手段があれば再度挑戦したいのですが、、、
ちなみに、今あるクワッドにボードをポン付けで載せ替えたところ、
アンプのキャブリェーションができず、ブーピー音がでて、止まらない状態でした。
当然この時点では、送信機の電源は入っております。
別のアンプをつないでキャリブレーションを(アンプのキャリブレーションをすれば使えるような記述)を
どこかで見たように思いますが、本当に実施してもいいものか、不安です。
今のところこのような状態です。思案思案の年末です。
解決の糸口はないののでしょうか?
いぬさんのリンクモンゴルさんのHPは古くから(太陽ぜろせん)から拝見しております。ユーチューブも
なかなか貴重な情報となっています。
今回のクワッドは、やはり最終動画を安定して撮りたいがための、ボードでしたが簡単には行かないものですね。
みなさんの情報を参考に、解決できるよう挑戦してみます。
また何かありましたら、アドバイスよろしくお願いいたします。
とうとうPCとコントロールボードをつなぎ、MultiWii2を起動したところ、
ドライバーは認識し、スタートを押してもボードのアクセスランプはつくのですが、センサー類が一切反応しなくなりました。
ただ、ストップを押すと止まります。という事はボードとはつながっているが、センサー類を読み取らなくなってしまったようです。
完全なる手詰まりになりました。
はてさて同したものかと考えております。
このボードの加速・気圧センサーを体験したくて購入しましたが
このボード以外を再度購入しないとしかたのないことなんでしょうか。
何らかの解決手段があれば再度挑戦したいのですが、、、
ちなみに、今あるクワッドにボードをポン付けで載せ替えたところ、
アンプのキャブリェーションができず、ブーピー音がでて、止まらない状態でした。
当然この時点では、送信機の電源は入っております。
別のアンプをつないでキャリブレーションを(アンプのキャリブレーションをすれば使えるような記述)を
どこかで見たように思いますが、本当に実施してもいいものか、不安です。
今のところこのような状態です。思案思案の年末です。
解決の糸口はないののでしょうか?
いぬさんのリンクモンゴルさんのHPは古くから(太陽ぜろせん)から拝見しております。ユーチューブも
なかなか貴重な情報となっています。
今回のクワッドは、やはり最終動画を安定して撮りたいがための、ボードでしたが簡単には行かないものですね。
みなさんの情報を参考に、解決できるよう挑戦してみます。
また何かありましたら、アドバイスよろしくお願いいたします。
Re:無題
※他のやつは消しときました.
うーん.そんな症状になるのは謎ですね.電源ランプは3.3V側も点灯してますか?
ちなみにこのボードの気圧センサはそんなに精度良くないので,あまり期待しないほうがいいです.それでも全く無いに比べたらマシですが.
そのような状態は正しく動いているとは思えないので,アンプをつないでも意味無いでしょう.むしろ下手に動き出したら厄介なのでやめといたほうがいいと思います.しっかり設定できてからつなぐべきです.
安定した飛行を確実にという事ならば,ケチらないでDJIのNAZAを買うことをおすすめします.あれは本当に信じられないくらい調整なしに安定して飛びます.どちらにせよ,PCでの設定は多少必要ですが.
うーん.そんな症状になるのは謎ですね.電源ランプは3.3V側も点灯してますか?
ちなみにこのボードの気圧センサはそんなに精度良くないので,あまり期待しないほうがいいです.それでも全く無いに比べたらマシですが.
そのような状態は正しく動いているとは思えないので,アンプをつないでも意味無いでしょう.むしろ下手に動き出したら厄介なのでやめといたほうがいいと思います.しっかり設定できてからつなぐべきです.
安定した飛行を確実にという事ならば,ケチらないでDJIのNAZAを買うことをおすすめします.あれは本当に信じられないくらい調整なしに安定して飛びます.どちらにせよ,PCでの設定は多少必要ですが.
multiwii328pの自励振動
設定完了、起動下記でつまずいてい降ります、ご教授お願いできますでしょうか。
1)自励振動で飛ばすことが出来ません。
2)AUX2--加速度センサー、磁気センサー等の ON、OFFに使用したいのですが設定方法が分かりません御教授していただけませんでしょうか。
宜しくお願いします。
1)自励振動で飛ばすことが出来ません。
2)AUX2--加速度センサー、磁気センサー等の ON、OFFに使用したいのですが設定方法が分かりません御教授していただけませんでしょうか。
宜しくお願いします。
Re:multiwii328pの自励振動
1)について
発振周期はどれくらいでしょうか.数Hz程度ならば,ゲインが低すぎる可能性が高いです.数十Hz以上ならゲインが高すぎる可能性が高いです.まずは標準ゲインから初めて,Pゲインを上げていくといいかと思います.
2)について.
本文中にも書きましたが,AUXは1しかまともに使うことができません.
2以降はプログラムの書き換えが必要,というか,ホビキンのボードの場合,兼用しているものから言って,まず利用はできません.諦めたほうがいいと思います.
AUX1をON/OFF切り替えにするしかありません.3ポジションスイッチがあればだいぶ楽なんですが.設定方法に関しては,途中まで書いて放置してしまっています… そろそろこちらも公開したいのですが.
発振周期はどれくらいでしょうか.数Hz程度ならば,ゲインが低すぎる可能性が高いです.数十Hz以上ならゲインが高すぎる可能性が高いです.まずは標準ゲインから初めて,Pゲインを上げていくといいかと思います.
2)について.
本文中にも書きましたが,AUXは1しかまともに使うことができません.
2以降はプログラムの書き換えが必要,というか,ホビキンのボードの場合,兼用しているものから言って,まず利用はできません.諦めたほうがいいと思います.
AUX1をON/OFF切り替えにするしかありません.3ポジションスイッチがあればだいぶ楽なんですが.設定方法に関しては,途中まで書いて放置してしまっています… そろそろこちらも公開したいのですが.
Re:自励振動
ヨーは安定性に関してはとりあえず初期値から変更しないで構いません.
調整するときは,ロールとピッチを揃えて変更していく必要があります.あとはIを0にして,DをPの1~10倍の範囲で揃えると,最終的には安定するのですが,まずはDも0にして調整すると簡単です.
あと,変える範囲はもっと広く必要です.大げさな例えで言えば,倍にする,半分にする,といった調整が必要です.倍・半分にして変わらない・悪化するなら1/4ずつ…などとやると簡単です.
調整するときは,ロールとピッチを揃えて変更していく必要があります.あとはIを0にして,DをPの1~10倍の範囲で揃えると,最終的には安定するのですが,まずはDも0にして調整すると簡単です.
あと,変える範囲はもっと広く必要です.大げさな例えで言えば,倍にする,半分にする,といった調整が必要です.倍・半分にして変わらない・悪化するなら1/4ずつ…などとやると簡単です.
自励振動3
Resありがとうございます、PDIを変えて挑戦、擁やっと飛ばせる状態になりました、有難うございました、やはりAUX2,3,4がほしいですね色々インターネット等で探していますが、分かりません。
Re:自励振動3
おお,飛ばせたようで何よりです.挙動を落ち着かせるためには,Dをできるだけ上げるというのがポイントです.
Dを0にして,Pを限界まで上げていき,発振しそうなくらいにした所でDを上げていくと調整しやすいです.
Iは正直無くてもいいんじゃないかなぁと思ってます.
AUXの他のチャンネルはこの基板だと使えないと思ってください.こればっかりは基板の性能上仕方ないことです.
Dを0にして,Pを限界まで上げていき,発振しそうなくらいにした所でDを上げていくと調整しやすいです.
Iは正直無くてもいいんじゃないかなぁと思ってます.
AUXの他のチャンネルはこの基板だと使えないと思ってください.こればっかりは基板の性能上仕方ないことです.
Re:自励振動4
inモータというのは何でしょう?
時々急にかくっと姿勢が崩れるような動作でしょうか?
時々急にかくっと姿勢が崩れるような動作でしょうか?
自励振動5
失礼しました、Outrunner Motorの間違いです。
スロットルがスムーズに反応しないで回転が一定しない状態ブン・ブーン・ブンの状態です。
環境
Turnigy D2836/11750KVBrushlessOutrunner Motor
Hobbyking SS Series 15-18A ESC
Lipo 11.1V 2000
prop 10*4.5
ご教授、宜しくお願いします。
スロットルがスムーズに反応しないで回転が一定しない状態ブン・ブーン・ブンの状態です。
環境
Turnigy D2836/11750KVBrushlessOutrunner Motor
Hobbyking SS Series 15-18A ESC
Lipo 11.1V 2000
prop 10*4.5
ご教授、宜しくお願いします。
Re:自励振動5
特に問題ないきはしますね… 反応がいまいちなのはすべてのモータですか? それとも飛んでいると突然姿勢を崩すような感じですか?
自励振動6
Res、有難うございます。
充電完了後、アイドルから浮かせようとスロットル UP、ブン、ブーンと少しあばれ出します、動かしていると少し落ち着いてきますが、浮かせる時はやはり少し暴れます、まだ高く上げていませんが、手で持つて1m位でフルスロットルでは暴れは無い様です。
このモーターを1個ずつRXに繋いでアーム、この場合スムーズに回転が上がります。
この様な状態です、如何でしょうか?
充電完了後、アイドルから浮かせようとスロットル UP、ブン、ブーンと少しあばれ出します、動かしていると少し落ち着いてきますが、浮かせる時はやはり少し暴れます、まだ高く上げていませんが、手で持つて1m位でフルスロットルでは暴れは無い様です。
このモーターを1個ずつRXに繋いでアーム、この場合スムーズに回転が上がります。
この様な状態です、如何でしょうか?
接続方法
FT232とmultiwii_328pのボードの接続はISP端子へ接続すればよいのですか、またFT232にはこの接続ケーブルは付属しているのですか。USBケーブルは別売りされているようですが。
Re:接続方法
このHobbyKingのボードに関しては,FT232が一体化しているので,外付けする必要はありません.
その他のMultiWiiのボードに関しては,基板上にUSB端子が無いのであれば,外付けのFT232基板が必要になります.その場合は,基板に「FTDI」などと書かれた6ピンのコネクタがあるかと思うので,そこに接続します.FTDIと書かれたポートはISPの端子ではなく,シリアル通信のポートになります.
MultiWiiはArduinoベースなので,専用のブートローダを利用しており,ISP端子からでなくてもプログラムの書き換えができるようになっているわけです.
その他のMultiWiiのボードに関しては,基板上にUSB端子が無いのであれば,外付けのFT232基板が必要になります.その場合は,基板に「FTDI」などと書かれた6ピンのコネクタがあるかと思うので,そこに接続します.FTDIと書かれたポートはISPの端子ではなく,シリアル通信のポートになります.
MultiWiiはArduinoベースなので,専用のブートローダを利用しており,ISP端子からでなくてもプログラムの書き換えができるようになっているわけです.
ボードの設定について
お尋ねいたします。
MWC_328p with FTDI/DSM2PORTの設定を行っています。
購入時点では正常に動作していたのですが、モータの停止位置を調整しようと
思って書き込みを致しましたところ、飛行状態に入らなくなりました。だから
前進できません。書き込みは正常にエラーも出ません。
どこをどのように調整して書き込みをすれば良いでしょうか?、基盤の種類
Configの訂正箇所等ご指導頂ければ幸甚に存じます。
MWC_328p with FTDI/DSM2PORTの設定を行っています。
購入時点では正常に動作していたのですが、モータの停止位置を調整しようと
思って書き込みを致しましたところ、飛行状態に入らなくなりました。だから
前進できません。書き込みは正常にエラーも出ません。
どこをどのように調整して書き込みをすれば良いでしょうか?、基盤の種類
Configの訂正箇所等ご指導頂ければ幸甚に存じます。
Re:ボードの設定について
すみません,見逃していました.
その辺りについてはかなりやることがあるので,まとめて記事にするつもりでした…
途中までは書いているんですが,なかなか書き上がらずにいます.
もうしばらく待っていただければ,解説記事をアップできるかと思います.
その辺りについてはかなりやることがあるので,まとめて記事にするつもりでした…
途中までは書いているんですが,なかなか書き上がらずにいます.
もうしばらく待っていただければ,解説記事をアップできるかと思います.
カウンター
委託案内
アンプ基板や同人誌を委託販売しています.リンクからどうぞ.(外部サイト)
・HA10mini基板セット
・HA10mini終段基板
・HA10miniハイパワーキット
・HPA&Analog vol.6冊子版
・同人誌DL委託
・同人誌DL委託(旧サークル名)
・HA10mini基板セット
・HA10mini終段基板
・HA10miniハイパワーキット
・HPA&Analog vol.6冊子版
・同人誌DL委託
・同人誌DL委託(旧サークル名)
ブログ内検索
カレンダー
| 10 | 2025/11 | 12 |
| S | M | T | W | T | F | S |
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 | 29 |
| 30 |
最新記事

最新トラックバック
カテゴリー
SilverLight
アクセス解析
広告