日々の活動記録や、暇つぶしなどなど
カテゴリ増やしました。
大学の研究について話すときに「研究」カテゴリを使いたいと思います。
で、現状。
これじゃなんだかわからないと思いますが爆
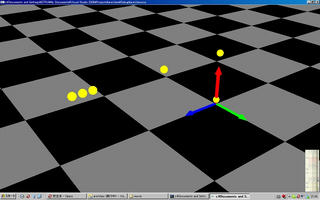
今やってる研究は移動ロボット上に6軸のロボットアームを設置してドアでもあけようじゃないか、という研究。
でアームの操作・状態表示のためのソフト作ってます。
操作・表示といっても。順運動学からアームの姿勢を取得して表示するため、行列計算をちゃんとやってます。
現状ではまだまだ間接の位置を表示するだけにとどまってますが…
それでもとりあえずキーボードから各関節の位置を動かすことができるようにはなりました。
んーOpenGLってめんどくさいなぁ。
などと思いつつ、もっとめんどくさい行列計算をかりかりやってます。
次はアームの表示と手先の表示だなぁ。
これをやるためには各軸に対して姿勢角を求めないといけないのでやることは倍増。
逆に言うと、現状では姿勢角を求めてないので超手抜きなわけですな。
はやいとここいつに見切りを付けてモータドライバ側の開発に移らないといけないんだけども…
やること満載だぁ。
大学の研究について話すときに「研究」カテゴリを使いたいと思います。
で、現状。
これじゃなんだかわからないと思いますが爆
今やってる研究は移動ロボット上に6軸のロボットアームを設置してドアでもあけようじゃないか、という研究。
でアームの操作・状態表示のためのソフト作ってます。
操作・表示といっても。順運動学からアームの姿勢を取得して表示するため、行列計算をちゃんとやってます。
現状ではまだまだ間接の位置を表示するだけにとどまってますが…
それでもとりあえずキーボードから各関節の位置を動かすことができるようにはなりました。
んーOpenGLってめんどくさいなぁ。
などと思いつつ、もっとめんどくさい行列計算をかりかりやってます。
次はアームの表示と手先の表示だなぁ。
これをやるためには各軸に対して姿勢角を求めないといけないのでやることは倍増。
逆に言うと、現状では姿勢角を求めてないので超手抜きなわけですな。
はやいとここいつに見切りを付けてモータドライバ側の開発に移らないといけないんだけども…
やること満載だぁ。
PR
この記事にコメントする
カウンター
委託案内
アンプ基板や同人誌を委託販売しています.リンクからどうぞ.(外部サイト)
・HA10mini基板セット
・HA10mini終段基板
・HA10miniハイパワーキット
・HPA&Analog vol.6冊子版
・同人誌DL委託
・同人誌DL委託(旧サークル名)
・HA10mini基板セット
・HA10mini終段基板
・HA10miniハイパワーキット
・HPA&Analog vol.6冊子版
・同人誌DL委託
・同人誌DL委託(旧サークル名)
ブログ内検索
カレンダー
| 09 | 2025/10 | 11 |
| S | M | T | W | T | F | S |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |||
| 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| 26 | 27 | 28 | 29 | 30 | 31 |
最新記事

最新トラックバック
カテゴリー
SilverLight
アクセス解析
広告