日々の活動記録や、暇つぶしなどなど
今日は泊り込みでマイコンカーの調整です。
現在は充電中につき一休憩。
とりあえず今日は不調だったセンサー基板の修理と先読みセンサーの取り付け部分の交換をしました。
センサー基板は幾度にも重なる衝突のおかげでパターンが少しはがれていました。
基板にガラスコンポジット基板を使っているので結構パターンが切れやすいんですよね…
でもガラコンは軽いからやめたくないところ。
先読みセンサーのほうは、今までの取り付け方だと角度がきちんと固定できず、震えてしまい、ストレートでも反応してしまうことがしばしばありました。
そのため、板の方向を90度変えて振動に強くしました。
おかげで車線変更の進入もスムーズに行えるようになりました。
今のところの問題は、なぜか車線変更終了処理がまったくできないこと。
いままで割合普通に走っていたのになぁ。
あと今日気がついたことに、自分が先読みに使っているKU381では細いラインが見つけられないようです。
車線変更からの復帰のシーケンスに使おうと思っていたら、斜めの角度ではラインを検知してくれませんでした。
なので今まで通りで完走できるようにしたいと思っています。
後はロータリエンコーダーを搭載するか否か。
今日、とりあえず完走できるようになったらやろう。
現在は充電中につき一休憩。
とりあえず今日は不調だったセンサー基板の修理と先読みセンサーの取り付け部分の交換をしました。
センサー基板は幾度にも重なる衝突のおかげでパターンが少しはがれていました。
基板にガラスコンポジット基板を使っているので結構パターンが切れやすいんですよね…
でもガラコンは軽いからやめたくないところ。
先読みセンサーのほうは、今までの取り付け方だと角度がきちんと固定できず、震えてしまい、ストレートでも反応してしまうことがしばしばありました。
そのため、板の方向を90度変えて振動に強くしました。
おかげで車線変更の進入もスムーズに行えるようになりました。
今のところの問題は、なぜか車線変更終了処理がまったくできないこと。
いままで割合普通に走っていたのになぁ。
あと今日気がついたことに、自分が先読みに使っているKU381では細いラインが見つけられないようです。
車線変更からの復帰のシーケンスに使おうと思っていたら、斜めの角度ではラインを検知してくれませんでした。
なので今まで通りで完走できるようにしたいと思っています。
後はロータリエンコーダーを搭載するか否か。
今日、とりあえず完走できるようになったらやろう。
PR
昨日、部活のメンバーと話していて急遽JMCR山形大会に参加することとなりました。
時間的に南関東と今のちょうど真ん中あたりにあり、大学祭にもかぶらず、なんとか行くことのできる距離ということで山形です。
行きは夜行バス、帰りは夜行電車です。
なんか電車だと11時間くらいかかるみたいですね…
それはさておき、マシンはもちろん今のCAFLRででます。
通常トレースは今までにないスピードで走れるようになったので、
これから車線変更とクランクを煮詰めていきたいと思います。
まずはエンコーダーの取り付けかな…
さぁやる気がでてきたぞ!
時間的に南関東と今のちょうど真ん中あたりにあり、大学祭にもかぶらず、なんとか行くことのできる距離ということで山形です。
行きは夜行バス、帰りは夜行電車です。
なんか電車だと11時間くらいかかるみたいですね…
それはさておき、マシンはもちろん今のCAFLRででます。
通常トレースは今までにないスピードで走れるようになったので、
これから車線変更とクランクを煮詰めていきたいと思います。
まずはエンコーダーの取り付けかな…
さぁやる気がでてきたぞ!
今日一日悩んだ結果、とりあえず新しいステアリング周りを作ることに決めました。
まぁモノはためしということで、これで同じ結果になるようだったらソフトの改良ですね。
設計も進めましたが、ギヤの配置に四苦八苦。
アッカーマンもどきを採用しているのと、河野さんのマシンとおなじモーター配置なので、非常に隙間が小さいです。
しかも、もともとの設計のときに、限界まで詰めてあるのでモーター変更はとてもきびしい。
いろいろ考えた結果、ギヤヘッドは使わずに、モーターの出力を直接ギヤダウンして使うことにしました。
これならメーカーによるギヤヘッドのガタを苦情にする必要はないです。笑
選定した結果、モーターはRE-max17の4.8V、4.5Wにすることにしました。
こいつは長さが短い割りにトルクがあるので減速比が小さくてすみます。
そのため、ギヤダウンが楽になるわけですね。
いま考えているギヤ比は43.2:1です。ずいぶん低いように感じますが、今までのマシンのステアリングよりもスピード、トルクともに上がっているので問題ないでしょう。
まぁ4.8V仕様のモーターを9.6V前後で使用するわけでしから倍がけになってるわけで…
しっかし…
・シャーシの剛性をあげるためシャーシ作り直し
・シャフトが曲がったので修正
・それに伴いタイヤの変更
・ドライブ基板、センサー基板の作り直し
・ステアリング周りの大改造
をやるとほとんど新マシンになってしまうがな…
自分はソフトが弱いからソフトに集中したいんだけどなぁ…
でもソフトができてもそれを実現してくれるハードが無いと意味無いし。
とにかく南関東後期に向けて死ぬ気でがんばりますよ。
まぁモノはためしということで、これで同じ結果になるようだったらソフトの改良ですね。
設計も進めましたが、ギヤの配置に四苦八苦。
アッカーマンもどきを採用しているのと、河野さんのマシンとおなじモーター配置なので、非常に隙間が小さいです。
しかも、もともとの設計のときに、限界まで詰めてあるのでモーター変更はとてもきびしい。
いろいろ考えた結果、ギヤヘッドは使わずに、モーターの出力を直接ギヤダウンして使うことにしました。
これならメーカーによるギヤヘッドのガタを苦情にする必要はないです。笑
選定した結果、モーターはRE-max17の4.8V、4.5Wにすることにしました。
こいつは長さが短い割りにトルクがあるので減速比が小さくてすみます。
そのため、ギヤダウンが楽になるわけですね。
いま考えているギヤ比は43.2:1です。ずいぶん低いように感じますが、今までのマシンのステアリングよりもスピード、トルクともに上がっているので問題ないでしょう。
まぁ4.8V仕様のモーターを9.6V前後で使用するわけでしから倍がけになってるわけで…
しっかし…
・シャーシの剛性をあげるためシャーシ作り直し
・シャフトが曲がったので修正
・それに伴いタイヤの変更
・ドライブ基板、センサー基板の作り直し
・ステアリング周りの大改造
をやるとほとんど新マシンになってしまうがな…
自分はソフトが弱いからソフトに集中したいんだけどなぁ…
でもソフトができてもそれを実現してくれるハードが無いと意味無いし。
とにかく南関東後期に向けて死ぬ気でがんばりますよ。
今回の南関東を踏まえての思ったこと。
ステアリングのぷるぷるがとまらない。
これは第一にゲインの設定が甘いというのもあると思います。
というかそれが大半だと思うのですが。
どうもPゲインとDゲインの最適化の方法がよくわからない。
とりあえずDを0にしてPをあげていって発振したところで
Dをあげて、Pをあげてを繰り返してみる…
というのを聞いたのですが、Dをどの程度あげていいのかもさっぱり。
みなさんの直流ゲインはどの程度なんだろう
センサーノーズのどこかをばねばかりで引っ張ってトルクを知りたいものです。
自分のプログラムではステアリングモーターのPWMの分解能は512です。
これも多いのか少ないのかよくわからない。
ついでにPWMの周期によっても動きが滑らかになったり、かくかくになったりする
ことを実験で確認済み。基本的には高いほうが滑らかなよう。
分解能は変えてないので周期だけが影響していると思われます。
ところが今のモータドライバではせいぜい20KHzが限度。
最初にFETドライバが燃えてしまう。
といろいろ考えていたのは結構前から。
今回の南関東にて防衛大のひとからこんなことを言われました
「マクソンよりがたが大きいギヤヘッドって相当だね」
実は自分が使っている並木精密宝石のギヤヘッドは、結構回転方向のがたがあります。
軸方向はそうでも無いんですが…
マクソンもバックラッシュは無いほうだとおもっていたんですが、
こういわれると驚きです。
やはりescapがよいのか…
ためしにセンサーノーズを手でテンションかけてやるとかなりゲインをあげても
震えないですね。(当たり前?)
これはモーターを変えるべきなのかな…
ステアリングのぷるぷるがとまらない。
これは第一にゲインの設定が甘いというのもあると思います。
というかそれが大半だと思うのですが。
どうもPゲインとDゲインの最適化の方法がよくわからない。
とりあえずDを0にしてPをあげていって発振したところで
Dをあげて、Pをあげてを繰り返してみる…
というのを聞いたのですが、Dをどの程度あげていいのかもさっぱり。
みなさんの直流ゲインはどの程度なんだろう
センサーノーズのどこかをばねばかりで引っ張ってトルクを知りたいものです。
自分のプログラムではステアリングモーターのPWMの分解能は512です。
これも多いのか少ないのかよくわからない。
ついでにPWMの周期によっても動きが滑らかになったり、かくかくになったりする
ことを実験で確認済み。基本的には高いほうが滑らかなよう。
分解能は変えてないので周期だけが影響していると思われます。
ところが今のモータドライバではせいぜい20KHzが限度。
最初にFETドライバが燃えてしまう。
といろいろ考えていたのは結構前から。
今回の南関東にて防衛大のひとからこんなことを言われました
「マクソンよりがたが大きいギヤヘッドって相当だね」
実は自分が使っている並木精密宝石のギヤヘッドは、結構回転方向のがたがあります。
軸方向はそうでも無いんですが…
マクソンもバックラッシュは無いほうだとおもっていたんですが、
こういわれると驚きです。
やはりescapがよいのか…
ためしにセンサーノーズを手でテンションかけてやるとかなりゲインをあげても
震えないですね。(当たり前?)
これはモーターを変えるべきなのかな…
お久しぶりです!
って挨拶しても見ている人がそんなにいるかはわからんですが--;
最近ロボットをやっていないわけでもなく、毎日忙しい日々をすごしていますよ。
今日はそんな中ぎりぎりの日程でマイコンカーラリー南関東地区大会に参加してきました。
本当に日程がぎりぎりで前々日まで別の部活の合宿に行ってたのです。
結果から報告すると完走できず…
去年からランクダウンですね。ちょっとショックです。
完走まで後数メートルだったのに、落ちてしまいました。
原因は一走目がセンサーの調整不足。左車線変更で落ちました。
二走目が原因不明。左車線変更で落ちました。
両方とも同じ場所ですが原因が違うのですよね。
一走目は左のクランクライン検知センサーが働いていなかったのが原因ですね。
二走目はいまいち原因がつかめず。
走りこみをぜんぜんしていないのでエラーはたくさんあるんだと思います。
はやくシャーシを作り直して剛性を高めたいですね。
写真は神様の一人、河野さんのマシン(右)と自分のマシン(左)です。
参考にしただけあって部分的に似ている箇所がありますが、
やはり、ぜんぜん足元にも及ばないですね。
全国いけるようがんばらなくては。
最近またリセット病で悩んでいます。
加速時やクランク手前のブレーキ時に多発するほか、ストレート後のコーナー入り口でもCPUがリセットします。
これらの発生場所から、モーターに負荷がかかったとき、もしくは、マシンに大きな加速度が働いた瞬間にリセットが発生しているものと考えられます。
まず後者ですが、マシンを手で持った状態で空転させ、上下左右などに揺らしたり、たたいてみたりしましたが、一度も症状を再現することはできませんでした。
それに前者の確認はとても大変です。
最初はバッテリーが電圧降下を起こしてリセットしているものと考えていました。
そこで、CPUを駆動用とは別電源にしました。しかし、リセットが起きるという現象にはまったく変化がなく、発生場所も同じような場所でリセットしています。
そうなると電波の形でノイズがでているのかと思われます。
まぁ駆動回路とは完全に絶縁されているわけではないので、GND経由という話もありますが…
しかし、一部間違えて存在していた巨大なグランドループを削除すると、若干の改善が見られたような気がします。
グランドループがなくなり、動作が安定するとなると完全にノイズが原因だと言い張れますが、微妙なところです。
とりあえず昔使っていたモータドライバ基板をひっぱりだしてきて、強引に今のマシンに乗せてみたいとおもいます。
まえの基板はよく考えて作ったので、電源系統が多少乱れても安定していますし、ノイズによるリセットらしき減少は今まで起きていないので比較対照になると考えています。
もしこれでリセットしなくなったら完全にモータドライバ基板が原因ということになりますね。
コネクタの交換が面倒だなぁ。
加速時やクランク手前のブレーキ時に多発するほか、ストレート後のコーナー入り口でもCPUがリセットします。
これらの発生場所から、モーターに負荷がかかったとき、もしくは、マシンに大きな加速度が働いた瞬間にリセットが発生しているものと考えられます。
まず後者ですが、マシンを手で持った状態で空転させ、上下左右などに揺らしたり、たたいてみたりしましたが、一度も症状を再現することはできませんでした。
それに前者の確認はとても大変です。
最初はバッテリーが電圧降下を起こしてリセットしているものと考えていました。
そこで、CPUを駆動用とは別電源にしました。しかし、リセットが起きるという現象にはまったく変化がなく、発生場所も同じような場所でリセットしています。
そうなると電波の形でノイズがでているのかと思われます。
まぁ駆動回路とは完全に絶縁されているわけではないので、GND経由という話もありますが…
しかし、一部間違えて存在していた巨大なグランドループを削除すると、若干の改善が見られたような気がします。
グランドループがなくなり、動作が安定するとなると完全にノイズが原因だと言い張れますが、微妙なところです。
とりあえず昔使っていたモータドライバ基板をひっぱりだしてきて、強引に今のマシンに乗せてみたいとおもいます。
まえの基板はよく考えて作ったので、電源系統が多少乱れても安定していますし、ノイズによるリセットらしき減少は今まで起きていないので比較対照になると考えています。
もしこれでリセットしなくなったら完全にモータドライバ基板が原因ということになりますね。
コネクタの交換が面倒だなぁ。
最近になってマシンの高速化には先読みセンサーが必要不可欠になってきました。
とくにコーナリング直前の減速ができるようになるため、ストレートが最高速が出せます。
で、いろいろ探していたのですが、SHARPのGP2D12。
こいつは千石で800円で手に入るし、アナログ値で出力してくれるので、マイコン処理が簡単ということで、スタートバー検知に使っていました。
で、スタートバー検知はミスが一回も発生せずによくできていたので、こいつを先読みにな使ってみようかと考え、取り付けまでしました。
しかし。よくデータシートを読んでみると、出力値の更新周期がなんと38ms。
遅すぎる!
もしマイコンカーが最高速だとすると、秒速6m近く出ます。
そうなると、38msでは228mmも進みます。とっくにコースアウトですね。
ということでせっかく取り付けましたが、このセンサーは却下になると思います。
一応実験だけはしてみようかと思っていますが。
かわりに考えたのがomronの光電センサー。
こいつはスポットが20mmと小さく検出誤差が少ないのが利点。
値段も高いけど、精度もいい。相撲ロボットの敵センサーとしてよく使っていますね。
で、カタログを見ていて…なんと電源電圧が最低でも12V。
こりゃ使いにくい。自分のマイコンカーは電源が1.2V*6なので7.2Vです。
そうなるとわざわざ昇圧回路をつまないといけないわけですね。
こりゃ不便すぎます。
最後にスタンレーのKU381.
出力がデジタルなので先読みするには楽かもしれない。
ついでに値段も3000円くらいらしいのでomronに比べれば安い。
なによりも、マイコンカーでの実績がある。
結構な人がこのセンサーを使っているようですね。
ということでこいつの見積もりをとってみました。
はやく届かないかな。
ポテンションは今日届きました。
取り付けを新方式に変えたので、もう壊すことはないでしょう。
大きなハード変更はありませんが、ちまちま重箱の隅をつついていいマシンに仕上げていきたいと思います。
ハード的な性能では全国でも通用する性能があるはずなので、それを引き出せる回路とプログラムですね。
これから一年はひたすらこの二つをがんばります。
とくにコーナリング直前の減速ができるようになるため、ストレートが最高速が出せます。
で、いろいろ探していたのですが、SHARPのGP2D12。
こいつは千石で800円で手に入るし、アナログ値で出力してくれるので、マイコン処理が簡単ということで、スタートバー検知に使っていました。
で、スタートバー検知はミスが一回も発生せずによくできていたので、こいつを先読みにな使ってみようかと考え、取り付けまでしました。
しかし。よくデータシートを読んでみると、出力値の更新周期がなんと38ms。
遅すぎる!
もしマイコンカーが最高速だとすると、秒速6m近く出ます。
そうなると、38msでは228mmも進みます。とっくにコースアウトですね。
ということでせっかく取り付けましたが、このセンサーは却下になると思います。
一応実験だけはしてみようかと思っていますが。
かわりに考えたのがomronの光電センサー。
こいつはスポットが20mmと小さく検出誤差が少ないのが利点。
値段も高いけど、精度もいい。相撲ロボットの敵センサーとしてよく使っていますね。
で、カタログを見ていて…なんと電源電圧が最低でも12V。
こりゃ使いにくい。自分のマイコンカーは電源が1.2V*6なので7.2Vです。
そうなるとわざわざ昇圧回路をつまないといけないわけですね。
こりゃ不便すぎます。
最後にスタンレーのKU381.
出力がデジタルなので先読みするには楽かもしれない。
ついでに値段も3000円くらいらしいのでomronに比べれば安い。
なによりも、マイコンカーでの実績がある。
結構な人がこのセンサーを使っているようですね。
ということでこいつの見積もりをとってみました。
はやく届かないかな。
ポテンションは今日届きました。
取り付けを新方式に変えたので、もう壊すことはないでしょう。
大きなハード変更はありませんが、ちまちま重箱の隅をつついていいマシンに仕上げていきたいと思います。
ハード的な性能では全国でも通用する性能があるはずなので、それを引き出せる回路とプログラムですね。
これから一年はひたすらこの二つをがんばります。
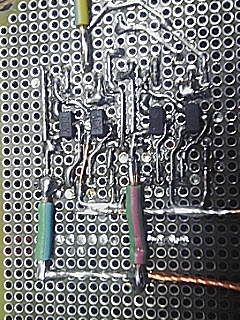
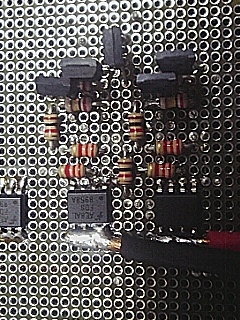
CAFLR4WDのモータドライバーの画像が出てきたのでアップ。
これが裏面と表面です。表は以前も公開しましたね。
ハーフピッチ基盤にぎっしり並んでいます。
一応電源ラインだけは太いものを使っています。
にしても、よくこれを数時間でつくったよなぁと自分に感心してしまう。
正直直したいとこたくさんなんだけどな
CAFLR4WDの紹介記事をまとめました。
見た目は違いますが、部活にある紹介記事と中身は同じです。
今までに無く長い紹介記事になりました。
それだけこのマシンにはいろいろ詰まっているということですね。
プログラム関連は何も触れていないので、今後補填したいところです。
いろいろ精進しなくては。
見た目は違いますが、部活にある紹介記事と中身は同じです。
今までに無く長い紹介記事になりました。
それだけこのマシンにはいろいろ詰まっているということですね。
プログラム関連は何も触れていないので、今後補填したいところです。
いろいろ精進しなくては。
いやぁ
例のノイズの件が悪化して、ほぼ毎回ミスるようになってしまいました。
原因まったく不明。というかノイズかどうかすら怪しくなってきました。
ノイズだろうと考えていたのですが、回路電源をDCDCコンバータに変えてみたり、ノイズキラーコンデンサーつけてみたり、フォトインタラプタの出力にコンデンサをつけて低インピーダンス化したり、
それでセンサー基盤をオシロで見てみるとノイズは皆無。電源ラインも問題なしな程度。
このせいで逆に悩みになってしまいました。解決できると思っていた方法はすべてやってしまいました。
プログラムのせいかとも思うのですが、これまたどこが原因かさっぱりわからず。
クランク後にしか起きないので、そこで問題が発生していることは確実なのですが…
おきたり起きなかったり。しかも発振しだしてもときどき止まるという不始末。
ん~完走すら危うい…
明日の朝最後の確認をして挑みたいと思います。
例のノイズの件が悪化して、ほぼ毎回ミスるようになってしまいました。
原因まったく不明。というかノイズかどうかすら怪しくなってきました。
ノイズだろうと考えていたのですが、回路電源をDCDCコンバータに変えてみたり、ノイズキラーコンデンサーつけてみたり、フォトインタラプタの出力にコンデンサをつけて低インピーダンス化したり、
それでセンサー基盤をオシロで見てみるとノイズは皆無。電源ラインも問題なしな程度。
このせいで逆に悩みになってしまいました。解決できると思っていた方法はすべてやってしまいました。
プログラムのせいかとも思うのですが、これまたどこが原因かさっぱりわからず。
クランク後にしか起きないので、そこで問題が発生していることは確実なのですが…
おきたり起きなかったり。しかも発振しだしてもときどき止まるという不始末。
ん~完走すら危うい…
明日の朝最後の確認をして挑みたいと思います。
カウンター
委託案内
アンプ基板や同人誌を委託販売しています.リンクからどうぞ.(外部サイト)
・HA10mini基板セット
・HA10mini終段基板
・HA10miniハイパワーキット
・HPA&Analog vol.6冊子版
・同人誌DL委託
・同人誌DL委託(旧サークル名)
・HA10mini基板セット
・HA10mini終段基板
・HA10miniハイパワーキット
・HPA&Analog vol.6冊子版
・同人誌DL委託
・同人誌DL委託(旧サークル名)
ブログ内検索
カレンダー
| 10 | 2025/11 | 12 |
| S | M | T | W | T | F | S |
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 | 29 |
| 30 |
最新記事

最新トラックバック
カテゴリー
SilverLight
アクセス解析
広告